我们提供安全,免费的手游软件下载!
 小丸子漫画 最新版
小丸子漫画 最新版  起点读书 官网版
起点读书 官网版  画涯 无删减版
画涯 无删减版  飞鸟听书 去广告纯净版
飞鸟听书 去广告纯净版  西西漫画 免费漫画首页
西西漫画 免费漫画首页  蓝猫动漫 免广告最新版
蓝猫动漫 免广告最新版  扑漫漫画 免费版
扑漫漫画 免费版  新新漫画 官网入口
新新漫画 官网入口  熬夜看书 手机版
熬夜看书 手机版  小丸子漫画 无广告版
小丸子漫画 无广告版 本文将对Aravis官方例程中的02-multiple-acquisition-main-thread进行简要解释,并介绍其中调用的arv_camera_set_acquisition_mode、arv_camera_create_stream、arv_camera_get_payload、arv_buffer_new、arv_stream_push_buffer、arv_camera_start_acquisition、arv_stream_pop_buffer、arv_camera_stop_acquisition函数。
aravis版本:0.8.31
操作系统:ubuntu-20.04
gcc版本:9.4.0
这段代码使用Aravis的API,控制相机连续采集,并在主线程中从缓冲区获取前10帧图像(假设不丢帧),主要操作步骤如下:
/* SPDX-License-Identifier:Unlicense */
/* Aravis header */
#include
/* Standard headers */
#include
#include
/*
* Connect to the first available camera, then acquire 10 buffers.
*/
int main (int argc, char **argv)
{
ArvCamera *camera;
GError *error = NULL;
//连接相机
camera = arv_camera_new ("192.168.6.63", &error);
if (ARV_IS_CAMERA (camera)) {
ArvStream *stream = NULL;
printf ("Found camera '%s'\n", arv_camera_get_model_name (camera, NULL));
//设置相机采集模式为连续采集
arv_camera_set_acquisition_mode (camera, ARV_ACQUISITION_MODE_CONTINUOUS, &error);
if (error == NULL)
//创建流对象
stream = arv_camera_create_stream (camera, NULL, NULL, &error);
if (ARV_IS_STREAM (stream)) {
int i;
size_t payload;
//从相机对象中获取图像负载大小(每个图像的字节大小)
payload = arv_camera_get_payload (camera, &error);
if (error == NULL) {
for (i = 0; i < 2; i++)
//在流对象buffer池中插入两个buffer
arv_stream_push_buffer (stream, arv_buffer_new (payload, NULL));
}
if (error == NULL)
//开始采集
arv_camera_start_acquisition (camera, &error);
if (error == NULL) {
for (i = 0; i < 10; i++) {
ArvBuffer *buffer;
//从流对象中获取buffer,此时buffer中已经包含了图像数据
buffer = arv_stream_pop_buffer (stream);
if (ARV_IS_BUFFER (buffer)) {
printf ("Acquired %d×%d buffer\n",
arv_buffer_get_image_width (buffer),
arv_buffer_get_image_height (buffer));
//将buffer放回流对象的buffer池中,而不是销毁
arv_stream_push_buffer (stream, buffer);
}
}
}
if (error == NULL)
//停止采集
arv_camera_stop_acquisition (camera, &error);
g_clear_object (&stream);
}
g_clear_object (&camera);
}
if (error != NULL) {
printf ("Error: %s\n", error->message);
return EXIT_FAILURE;
}
return EXIT_SUCCESS;
}
此例程较为简单,每一步的细节查看注释即可,此处不过多讲解。
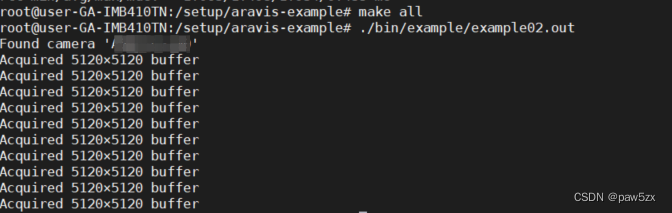
运行结果:
简介:设置相机的采集模式
void arv_camera_set_acquisition_mode(
ArvCamera* camera,
ArvAcquisitionMode value,
GError** error
)
其中value是个枚举值,可选的值有:
ARV_ACQUISITION_MODE_CONTINUOUS
,
ARV_ACQUISITION_MODE_SINGLE_FRAME
,
ARV_ACQUISITION_MODE_MULTI_FRAME
分别代表连续采集,单帧采集和多帧采集。
简介:创建流对象
注意:最终必须调用g_object_unref()释放内存
ArvStream* arv_camera_create_stream(
ArvCamera* camera,
ArvStreamCallback callback,
void* user_data,
GError** error
)
其中callback是个回调函数,用于数据帧的处理;user_data是向回调函数中传递的用户数据。本例中这两个参数均为NULL,表示不使用回调函数。
Available since: 0.2.0
简介:从相机检索一个图像所需的存储空间大小。此值一般用于创建流缓冲区。
guint arv_camera_get_payload(ArvCamera* camera, GError** error)
Available since: 0.8.0
简介:此函数用于创建一个新的缓冲区,专门用来存储视频流图像的数据。函数提供了灵活的内存管理选项,让调用者可以选择预先分配内存(后续可由调用者重新分配)或由函数来分配内存。
ArvBuffer* arv_buffer_new(size_t size, void* preallocated)
其中preallocated指向预分配的内存缓冲区。若此参数不为NULL,则指向的内存将用作缓冲区存储数据;为NULL则由函数分配内存。
Available since: 0.2.0
简介:将一个buffer添加到一个特定的流中。当缓冲区被推送到流中时,流对象接管了该缓冲区对象的所有权。
void arv_stream_push_buffer(ArvStream* stream, ArvBuffer* buffer)
Available since: 0.2.0
简介:开始采集
void arv_camera_start_acquisition(ArvCamera* camera, GError** error)
Available since: 0.8.0
简介:从流的输出队列中弹出一个buffer并返回。这个buffer可能包含无效的图像数据,调用者应在使用图像数据前检查其有效性。
若输出队列为空,则阻塞至数据来临。
ArvBuffer* arv_stream_pop_buffer(ArvStream* stream)
Available since: 0.2.0
简介:停止采集
void arv_camera_stop_acquisition(ArvCamera* camera, GError** error)
Available since: 0.8.0
热门资讯