我们提供安全,免费的手游软件下载!
 小丸子漫画 最新版
小丸子漫画 最新版  起点读书 官网版
起点读书 官网版  画涯 无删减版
画涯 无删减版  飞鸟听书 去广告纯净版
飞鸟听书 去广告纯净版  西西漫画 免费漫画首页
西西漫画 免费漫画首页  蓝猫动漫 免广告最新版
蓝猫动漫 免广告最新版  扑漫漫画 免费版
扑漫漫画 免费版  新新漫画 官网入口
新新漫画 官网入口  熬夜看书 手机版
熬夜看书 手机版  小丸子漫画 无广告版
小丸子漫画 无广告版
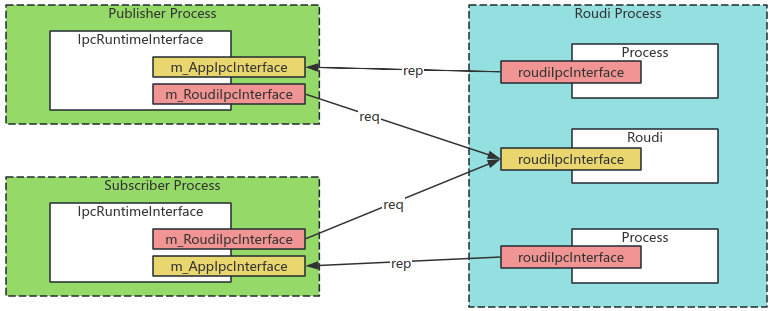
通过前面的介绍,订阅者、发布者与Roudi守护进程之间也需要通信,如上文介绍的,请求Roudi守护进村创建并配置端口数据。整体结构如下图所示:
由于通信层在类Unix操作系统和Windows操作系统下实现不同(见下面的代码片段),所以我们分开介绍其实现。
#if defined(_WIN32)
using IoxIpcChannelType = iox::posix::NamedPipe;
#else
using IoxIpcChannelType = iox::posix::UnixDomainSocket;
#endif
接下来我们从数据的序列化和反序列化开始。
前一篇文章中,这部分通信没有使用三方框架,使用简单的字符串拼接的方式进行序列化,如下所示:
template
void IpcMessage::addEntry(const T& entry) noexcept
{
std::stringstream newEntry;
newEntry << entry;
if (!isValidEntry(newEntry.str()))
{
LogError() << "\'" << newEntry.str().c_str() << "\' is an invalid IPC channel entry";
m_isValid = false;
}
else
{
m_msg.append(newEntry.str() + m_separator);
++m_numberOfElements;
}
}
template
IpcMessage& IpcMessage::operator<<(const T& entry) noexcept
{
addEntry(entry);
return *this;
}
上面的代码较为简单,这里不作详细解释了。反序列化也很简单,这里就贴一下代码了,非常简单粗暴的实现:
std::string IpcMessage::getElementAtIndex(const uint32_t index) const noexcept
{
std::string messageRemainder(m_msg);
size_t startPos = 0u;
size_t endPos = messageRemainder.find_first_of(m_separator, startPos);
for (uint32_t counter = 0u; endPos != std::string::npos; ++counter)
{
if (counter == index)
{
return messageRemainder.substr(startPos, endPos - startPos);
}
startPos = endPos + 1u;
endPos = messageRemainder.find_first_of(m_separator, startPos);
}
return std::string();
}
正如在
引言
中介绍的,类Unix系统使用Unix域套接字实现IPC通信机制。由
UnixDomainSocket
封装初始化、销毁、发送和接收等逻辑,这里我们主要介绍发送和接收逻辑的具体实现。
职责:
封装客户端的消息发送逻辑
参数:
msg
:待发送的消息。
cxx::expected UnixDomainSocket::send(const std::string& msg) const noexcept
{
// we also support timedSend. The setsockopt call sets the timeout for all further sendto calls, so we must set
// it to 0 to turn the timeout off
return timedSend(msg, units::Duration::fromSeconds(0ULL));
}
发送函数
send
只是简单地调用地超时时间的发送函数
timedSend
。输入的超时时间为0,意味着立即发送。
timedSend
的实现如下所示:
cxx::expected UnixDomainSocket::timedSend(const std::string& msg,
const units::Duration& timeout) const noexcept
{
if (msg.size() > m_maxMessageSize)
{
return cxx::error(IpcChannelError::MESSAGE_TOO_LONG);
}
if (IpcChannelSide::SERVER == m_channelSide)
{
std::cerr << "sending on server side not supported for unix domain socket \"" << m_name << "\"" << std::endl;
return cxx::error(IpcChannelError::INTERNAL_LOGIC_ERROR);
}
auto tv = timeout.timeval();
auto setsockoptCall = posixCall(iox_setsockopt)(m_sockfd, SOL_SOCKET, SO_SNDTIMEO, &tv, sizeof(tv))
.failureReturnValue(ERROR_CODE)
.ignoreErrnos(EWOULDBLOCK)
.evaluate();
if (setsockoptCall.has_error())
{
return cxx::error(convertErrnoToIpcChannelError(setsockoptCall.get_error().errnum));
}
auto sendCall = posixCall(iox_sendto)(m_sockfd, msg.c_str(), msg.size() + NULL_TERMINATOR_SIZE, 0, nullptr, 0)
.failureReturnValue(ERROR_CODE)
.evaluate();
if (sendCall.has_error())
{
return cxx::error(convertErrnoToIpcChannelError(sendCall.get_error().errnum));
}
return cxx::success();
}
逐段代码分析:
LINE 04 ~ LINE 13: 错误处理——消息长度过长、类型服务端。整体结构图中,黄色的
LINE 15 ~ LINE 24:
调用POSIX接口(类Unix系统调用)
setsockopt
,设置超时时间。
LINE 25 ~ LINE 32:
调用POSIX接口(类Unix系统调用)
sendto
发送数据。
可以看到,Unix版本的发送实现就是简单地调用系统调用。
职责:
封装消息接收逻辑。
返回:
消息字符串或错误类型。
cxx::expected UnixDomainSocket::receive() const noexcept
{
// we also support timedReceive. The setsockopt call sets the timeout for all further recvfrom calls, so we must set
// it to 0 to turn the timeout off
struct timeval tv = {};
tv.tv_sec = 0;
tv.tv_usec = 0;
return timedReceive(units::Duration(tv));
}
接收函数
receive
只是简单地调用地超时时间的发送函数
timedReceive
。输入的超时时间为0,即没有结果立即返回。
timedReceive
的实现如下所示:
cxx::expected
UnixDomainSocket::timedReceive(const units::Duration& timeout) const noexcept
{
if (IpcChannelSide::CLIENT == m_channelSide)
{
std::cerr << "receiving on client side not supported for unix domain socket \"" << m_name << "\"" << std::endl;
return cxx::error(IpcChannelError::INTERNAL_LOGIC_ERROR);
}
auto tv = timeout.timeval();
auto setsockoptCall = posixCall(iox_setsockopt)(m_sockfd, SOL_SOCKET, SO_RCVTIMEO, &tv, sizeof(tv))
.failureReturnValue(ERROR_CODE)
.ignoreErrnos(EWOULDBLOCK)
.evaluate();
if (setsockoptCall.has_error())
{
return cxx::error(convertErrnoToIpcChannelError(setsockoptCall.get_error().errnum));
}
// NOLINTJUSTIFICATION needed for recvfrom
// NOLINTNEXTLINE(hicpp-avoid-c-arrays, cppcoreguidelines-avoid-c-arrays)
char message[MAX_MESSAGE_SIZE + 1];
auto recvCall = posixCall(iox_recvfrom)(m_sockfd, &message[0], MAX_MESSAGE_SIZE, 0, nullptr, nullptr)
.failureReturnValue(ERROR_CODE)
.suppressErrorMessagesForErrnos(EAGAIN, EWOULDBLOCK)
.evaluate();
message[MAX_MESSAGE_SIZE] = 0;
if (recvCall.has_error())
{
return cxx::error(convertErrnoToIpcChannelError(recvCall.get_error().errnum));
}
return cxx::success(&message[0]);
}
逐段代码分析:
LINE 04 ~ LINE 08: 错误处理——通道类型服务端。整体结构图中,黄色的。
LINE 10 ~ LINE 19:
调用POSIX接口(类Unix系统调用)
setsockopt
,设置超时时间。
LINE 22 ~ LINE 33:
调用POSIX接口(类Unix系统调用)
recvfrom
接收数据。
由于Windows不支持Unix域套接字,使用共享内存的方式来模拟。每引入一个发布者或订阅者,都需要开辟两条通道——收和发,每条通道会使用单独一块共享内存,即需要开辟两块共享内存。
职责:
封装消息发送逻辑。
参数:
msg
:待发送的消息。
cxx::expected NamedPipe::send(const std::string& message) const noexcept
{
if (!m_isInitialized)
{
return cxx::error(IpcChannelError::NOT_INITIALIZED);
}
if (message.size() > MAX_MESSAGE_SIZE)
{
return cxx::error(IpcChannelError::MESSAGE_TOO_LONG);
}
cxx::Expects(!m_data->sendSemaphore().wait().has_error());
IOX_DISCARD_RESULT(m_data->messages.push(Message_t(cxx::TruncateToCapacity, message)));
cxx::Expects(!m_data->receiveSemaphore().post().has_error());
return cxx::success<>();
}
逐段代码分析:
LINE 03 ~ LINE 11: 错误处理——未初始化(消息队列共享内存未创建)、消息长度过长。这里没有判断是服务端还是客户端,估计是不同人实现的。
LINE 13 ~ LINE 15: 第14行,往消息队列(共享内存)中存入消息。第13行是通过 发送 信号量判断消息队列是否已满,若已满,则一直等待,直到接收端读取消息,唤醒发送端。第15行是唤醒接收端读取消息。
iceoryx还提供了timedSend函数,带有超时机制,即超时则发送失败。还提供了不等待的版本trySend,若队列已满,则发送失败。这两个函数本文不做介绍。
职责:
封装消息接收逻辑。
返回:
消息字符串或错误类型。
cxx::expected NamedPipe::receive() const noexcept
{
if (!m_isInitialized)
{
return cxx::error(IpcChannelError::NOT_INITIALIZED);
}
cxx::Expects(!m_data->receiveSemaphore().wait().has_error());
auto message = m_data->messages.pop();
if (message.has_value())
{
cxx::Expects(!m_data->sendSemaphore().post().has_error());
return cxx::success(message->c_str());
}
return cxx::error(IpcChannelError::INTERNAL_LOGIC_ERROR);
}
逐段代码分析:
LINE 03 ~ LINE 06: 错误处理——未初始化(消息队列共享内存未创建)。这里没有判断是服务端还是客户端,估计是不同人实现的。
LINE 08 ~ LINE 14: 第14行,往消息队列(共享内存)中存入消息。第8行是通过 接收 信号量判断消息队列是否为空,若为空,则一直等待,直到发送端发送消息,唤醒发送端。第12行是唤醒发送端发送消息。
iceoryx还提供了timedReceive函数,带有超时机制,即超时则接收失败。还提供了不等待的版本tryReceive,若队列为空,则接收失败。这两个函数本文不做介绍。
Roudi
启动后,会开启一个线程来监听和处理来自客户端(订阅者、发布者)的请求,如下所示:
void RouDi::startProcessRuntimeMessagesThread() noexcept
{
m_handleRuntimeMessageThread = std::thread(&RouDi::processRuntimeMessages, this);
posix::setThreadName(m_handleRuntimeMessageThread.native_handle(), "IPC-msg-process");
}
线程执行函数为
processRuntimeMessages
,内部就是一个循环,如下所示:
void RouDi::processRuntimeMessages() noexcept
{
runtime::IpcInterfaceCreator roudiIpcInterface{IPC_CHANNEL_ROUDI_NAME};
// the logger is intentionally not used, to ensure that this message is always printed
std::cout << "RouDi is ready for clients" << std::endl;
while (m_runHandleRuntimeMessageThread)
{
// read RouDi's IPC channel
runtime::IpcMessage message;
if (roudiIpcInterface.timedReceive(m_runtimeMessagesThreadTimeout, message))
{
auto cmd = runtime::stringToIpcMessageType(message.getElementAtIndex(0).c_str());
std::string runtimeName = message.getElementAtIndex(1);
processMessage(message, cmd, RuntimeName_t(cxx::TruncateToCapacity, runtimeName));
}
}
}
通过上述代码可知,发送给Roudi的所有消息,第一项为请求类型,第二项为运行。这里调用了
processMessage
函数,这和上一篇文章中的
3.5 RouDi::processMessage
关联了。
热门资讯