我们提供安全,免费的手游软件下载!
 小丸子漫画 最新版
小丸子漫画 最新版  起点读书 官网版
起点读书 官网版  画涯 无删减版
画涯 无删减版  飞鸟听书 去广告纯净版
飞鸟听书 去广告纯净版  西西漫画 免费漫画首页
西西漫画 免费漫画首页  蓝猫动漫 免广告最新版
蓝猫动漫 免广告最新版  扑漫漫画 免费版
扑漫漫画 免费版  新新漫画 官网入口
新新漫画 官网入口  熬夜看书 手机版
熬夜看书 手机版  小丸子漫画 无广告版
小丸子漫画 无广告版
上一篇已经实现了ModbusTcp服务器和8个主要的功能码,只是还没有实现错误处理功能。
但是在测试客户端时却发现了上一篇的一个错误,那就是写数据成功,服务器不需要响应。
接下来要做的就是实现ModbusTcp客户端。有了清晰的协议,代码循规蹈矩的写就行了。
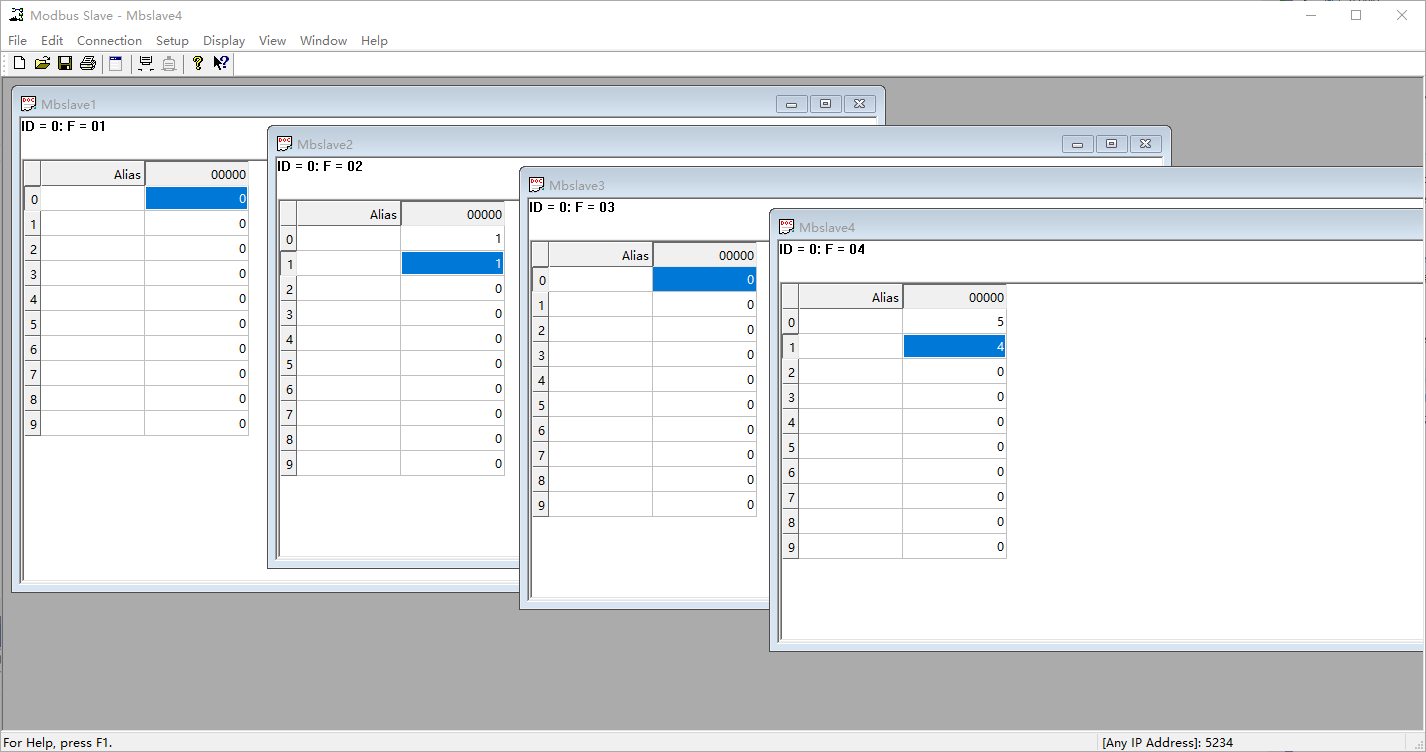
原始数据
其中只读寄存器和线圈都有可分辨的值
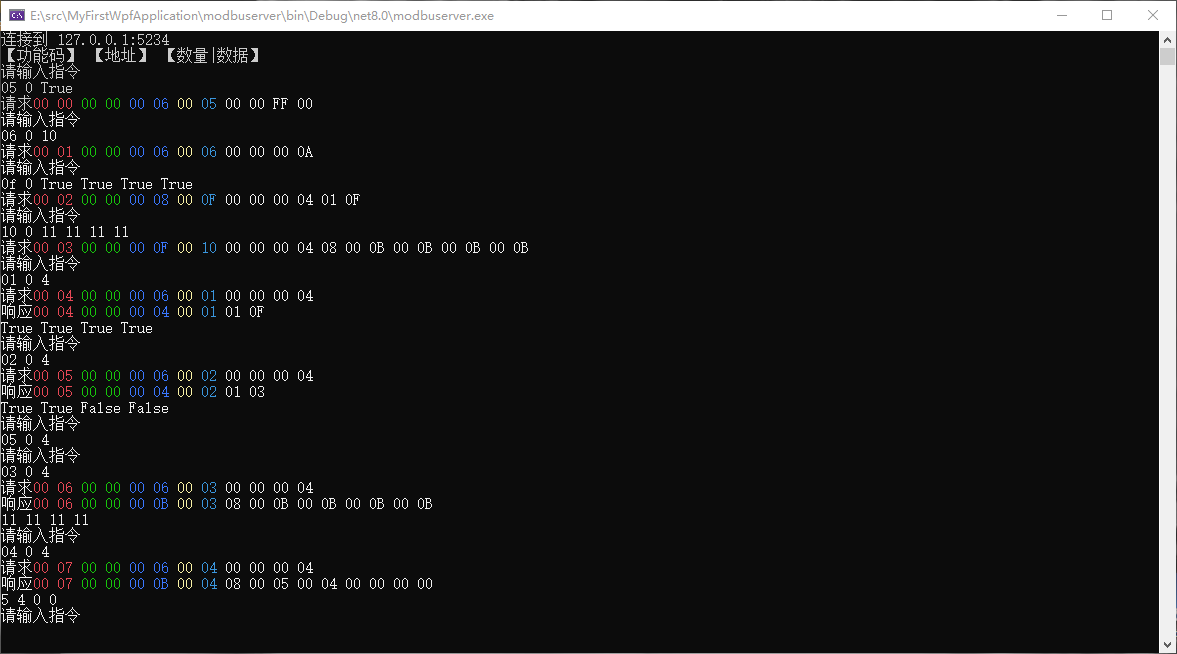
交互
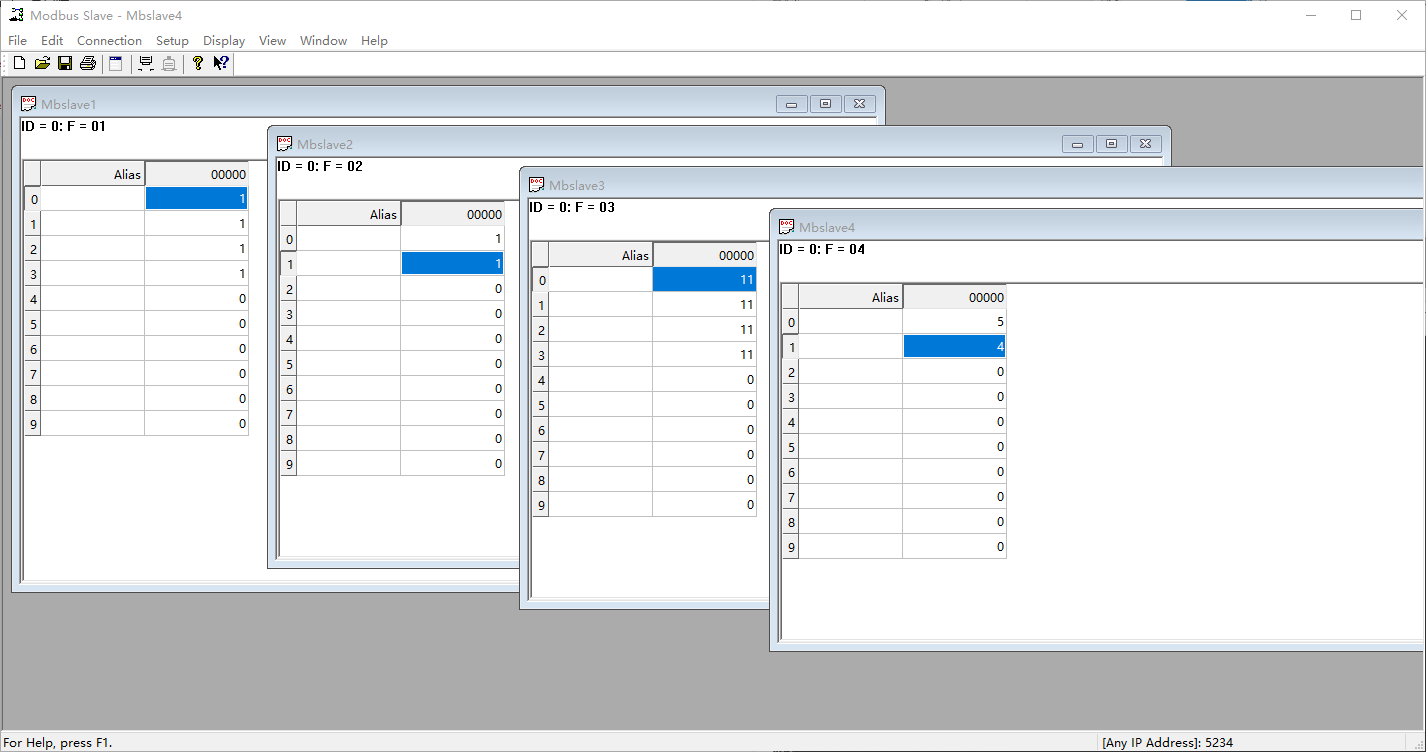
改变线圈和寄存器的值
//WebModbus.cs
// 读 读写线圈
public async Task Request_01(ushort startIndex, ushort length){}
// 读 只读线圈
public async Task Request_02(ushort startIndex, ushort length){}
// 读 读写寄存器
public async Task Request_03(ushort startIndex, ushort length){}
// 读 只读寄存器
public async Task Request_04(ushort startIndex, ushort length){}
// 写 读写一个线圈
public async Task Request_05(ushort startIndex, bool coil){}
// 写 读写一个寄存器
public async Task Request_06(ushort startIndex, ushort register){}
// 写 读写多个线圈
public async Task Request_0f(ushort startIndex, bool[] coils){}
// 写 读写多个寄存器
public async Task Request_10(ushort startIndex, ushort[] registers){}
PrintBytes(ADUMessage.Serialze(request), "请求");
if (Client != null)
{
await Client.Client.SendAsync(new Memory(ADUMessage.Serialze(request)));
byte[] bytes = new byte[1024];
int msgLength = await Client.Client.ReceiveAsync(new ArraySegment(bytes));
PrintBytes(bytes.Take(msgLength).ToArray(), "响应");
}
public bool[] BytesToBools(byte[] bytes,ushort dataNumber){}
public byte[] BoolToBytes(bool[] bools){}
我们还需要一个界面区使用这个协议,所以还需要一个测试类。
命令行程序的话,就是使用
while
循环了,在循环中接收指令
private static async Task StartClient(string[] args)
{
//其他代码...
while (true)
{
Console.WriteLine("请输入指令");
string? msg = Console.ReadLine();
while (msg == null)
{
//功能码 数据
msg = Console.ReadLine();
}
try
{
string[] data = msg.Split(' ');
ushort funCode = ushort.Parse(data[0],NumberStyles.HexNumber);
ushort startIndex;
ushort length;
switch (funCode)
{
//读 读写线圈
case 0x01:
startIndex = ushort.Parse(data[1]);
length= ushort.Parse(data[2]);
var rs_01 = await webModbusClient.Request_01(startIndex, length);
PrintBools(rs_01);
break;
//读 只读线圈
case 0x02:
startIndex = ushort.Parse(data[1]);
length = ushort.Parse(data[2]);
var rs_02 = await webModbusClient.Request_02(startIndex, length);
PrintBools(rs_02);
break;
//读 读写寄存器
case 0x03:
startIndex = ushort.Parse(data[1]);
length = ushort.Parse(data[2]);
var rs_03 = await webModbusClient.Request_03(startIndex, length);
for (global::System.Int32 i = 0; i < length; i++)
{
Console.Write(rs_03[i]+" ");
}
Console.WriteLine();
break;
//读 只读寄存器
case 0x04:
startIndex = ushort.Parse(data[1]);
length = ushort.Parse(data[2]);
var rs_04 = await webModbusClient.Request_04(startIndex, length);
for (global::System.Int32 i = 0; i < length; i++)
{
Console.Write(rs_04[i] + " ");
}
Console.WriteLine();
break;
//写 读写一个线圈
case 0x05:
startIndex = ushort.Parse(data[1]);
var coil = bool.Parse(data[2]);
var rs_05 = await webModbusClient.Request_05(startIndex, coil);
break;
//写 读写一个寄存器
case 0x06:
startIndex = ushort.Parse(data[1]);
var register = ushort.Parse(data[2]);
var rs_06 = await webModbusClient.Request_06(startIndex, register);
break;
//写 读写多个线圈
case 0x0f:
startIndex = ushort.Parse(data[1]);
bool[] coils = new bool[data.Length - 2];
for (global::System.Int32 i = 2; i < data.Length; i++)
{
coils[i - 2] = bool.Parse(data[i]);
}
var rs_0f = await webModbusClient.Request_0f(startIndex, coils);
break;
//写 读写多个寄存器
case 0x10:
startIndex = ushort.Parse(data[1]);
ushort[] registers = new ushort[data.Length - 2];
for (global::System.Int32 i = 2; i < data.Length; i++)
{
registers[i - 2] = ushort.Parse(data[i]);
}
var rs_10 = await webModbusClient.Request_10(startIndex, registers);
break;
default:
//return Response_01(request);
break;
}
}
catch (Exception e)
{
}
}
}
///
/// 数据仓库,144KB
///
public class DataStore
{
///
/// 读写16位寄存器,64KB
///
public ushort[] HoldingRegisters;
///
/// 只读16位寄存器,64KB
///
public ushort[] InputRegisters;
///
/// 读写1位线圈,8KB
///
public bool[] CoilDiscretes;
///
/// 只读1位线圈,8KB
///
public bool[] CoilInputs;
public DataStore()
{
HoldingRegisters = new ushort[65536];
InputRegisters = new ushort[65536];
CoilDiscretes = new bool[65536];
CoilInputs = new bool[65536];
}
///
/// 读 读写16位寄存器
///
///
///
///
/// 读 只读16位寄存器
///
///
///
///
/// 读 读写1位线圈
///
///
///
///
/// 读 只读1位线圈
///
///
///
///
/// 写 读写16位寄存器
///
///
///
public void WriteHoldingRegisters(ushort startIndex, ushort[] data)
{
for (int i = 0; i < data.Length; i++)
{
if (startIndex+i < 65536)
{
HoldingRegisters[startIndex + i] = data[i];
}
}
}
///
/// 写 读写1位线圈
///
///
///
public void WriteCoilDiscretes(ushort startIndex, bool[] data)
{
for (int i = 0; i < data.Length; i++)
{
if (startIndex + i < 65536)
{
CoilDiscretes[startIndex + i] = data[i];
}
}
}
}
///
/// Modbus报文
///
public class ADUMessage
{
///
/// 事务标识符
///
public ushort Transaction { get; set; }
///
/// 协议标识符
///
public ushort Protocol { get; set; }
///
/// 报文长度
///
public ushort Length { get; set; }
///
/// 单元标识符
///
public byte Unit { get; set; }
///
/// 功能码
///
public byte FunctionCode { get; set; }
///
/// 数据
///
public byte[] Data { get; set; }
public static ADUMessage Deserialize(byte[] buffer)
{
//BinaryReader读取方式是小端(右边是高字节),而modbus是大端传输(左边是高字节)
BinaryReader reader = new BigEndianBinaryReader(new MemoryStream(buffer));
ADUMessage adu = new ADUMessage()
{
Transaction = reader.ReadUInt16(),
Protocol = reader.ReadUInt16(),
Length = reader.ReadUInt16(),
Unit = reader.ReadByte(),
FunctionCode = reader.ReadByte(),
Data = reader.ReadBytes(buffer.Length - 8)
};
return adu;
}
public static byte[] Serialze(ADUMessage message)
{
using (MemoryStream ms=new MemoryStream())
{
BinaryWriter writer = new BigEndianBinaryWriter(ms);
writer.Write(message.Transaction);
writer.Write(message.Protocol);
writer.Write(message.Length);
writer.Write(message.Unit);
writer.Write(message.FunctionCode);
writer.Write(message.Data);
return ms.ToArray();
}
}
}
///
/// Modbus服务器
///
public class WebModbusServer
{
public DataStore store = new DataStore();
public ADUMessage HandleRequest(byte[] buffer)
{
ADUMessage request = ADUMessage.Deserialize(buffer);
switch (request.FunctionCode)
{
//读 读写线圈
case 0x01:
return Response_01(request);
//读 只读线圈
case 0x02:
return Response_02(request);
//读 读写寄存器
case 0x03:
return Response_03(request);
//读 只读寄存器
case 0x04:
return Response_04(request);
//写 读写一个线圈
case 0x05:
return Response_05(request);
//写 读写一个寄存器
case 0x06:
return Response_06(request);
//写 读写多个线圈
case 0x0f:
return Response_0f(request);
//写 读写多个寄存器
case 0x10:
return Response_10(request);
default:
return Response_01(request);
}
}
public byte[] CoilToBytes(bool[] bools)
{
int byteCount = (bools.Length + 7) / 8; // 计算所需的字节数
byte[] bytes = new byte[byteCount];
for (int i = 0; i < bools.Length; i++)
{
int byteIndex = i / 8; // 计算当前布尔值应该存储在哪个字节中
int bitIndex = i % 8; // 计算当前布尔值应该存储在字节的哪个位上
if (bools[i])
{
// 设置对应位为 1
bytes[byteIndex] |= (byte)(1 << bitIndex);
}
else
{
// 对应位保持为 0,无需额外操作
}
}
return bytes;
}
///
/// 读 读写线圈
///
///
///
/// 读 只读线圈
///
///
///
/// 读 读写寄存器
///
///
///
/// 读 只读寄存器
///
///
///
/// 写 读写一个线圈
///
///
///
/// 写 读写一个寄存器
///
///
///
/// 写 读写多个线圈
///
///
///
/// 写 读写多个寄存器
///
///
///
/// Modbus客户端
///
public class WebModbusClient
{
public ushort Transaction { get; set; }
public TcpClient Client { get; }
public WebSocket WebSocket { get; set; }
public ADUMessage request { get; set; }
public ADUMessage response { get; set; }
public WebModbusClient(TcpClient client)
{
Transaction = 0x00;
Client = client;
}
public WebModbusClient(WebSocket webSocket)
{
Transaction = 0x00;
WebSocket = webSocket;
}
private ADUMessage CreateMsg()
{
ADUMessage message = new ADUMessage();
message.Transaction = Transaction;
Transaction++;
message.Protocol = 0x00;
message.Unit = 0x00;
this.request = message;
return message;
}
public void PrintBytes(byte[] bytes, string prefix = "")
{
Console.Write(prefix);
for (int i = 0; i < bytes.Length; i++)
{
if (i < 2)
{
Console.ForegroundColor = ConsoleColor.Red;
}
else if (i < 4)
{
Console.ForegroundColor = ConsoleColor.Green;
}
else if (i < 6)
{
Console.ForegroundColor = ConsoleColor.Blue;
}
else if (i < 7)
{
Console.ForegroundColor = ConsoleColor.Yellow;
}
else if (i < 8)
{
Console.ForegroundColor = ConsoleColor.DarkCyan;
}
else
{
Console.ForegroundColor = ConsoleColor.White;
}
Console.Write(bytes[i].ToString("X2") + " ");
}
Console.WriteLine();
}
public bool[] BytesToBools(byte[] bytes,ushort dataNumber)
{
int index = 0;
bool[] bools = new bool[dataNumber];
foreach (var item in bytes)
{
//1000 0000
byte rr = (byte)0x01;
for (int i = 0; i < 8; i++)
{
if (index < dataNumber)
{
var result = rr & item;
if (result > 0)
{
bools[index] = true;
}
else
{
bools[index] = false;
}
//0100 0000
rr <<= 1;
index++;
}
else
{
break;
}
}
}
return bools;
}
private async Task SendWithResponse(ADUMessage request)
{
PrintBytes(ADUMessage.Serialze(request), "请求");
if (Client != null)
{
await Client.Client.SendAsync(new Memory(ADUMessage.Serialze(request)));
byte[] bytes = new byte[1024];
int msgLength = await Client.Client.ReceiveAsync(new ArraySegment(bytes));
this.response = ADUMessage.Deserialize(bytes.Take(msgLength).ToArray());
PrintBytes(bytes.Take(msgLength).ToArray(), "响应");
return response;
}
else if(WebSocket != null)
{
await WebSocket.SendAsync(new ArraySegment(ADUMessage.Serialze(request)),WebSocketMessageType.Binary,true,CancellationToken.None);
byte[] bytes = new byte[1024];
var result = await WebSocket.ReceiveAsync(new ArraySegment(bytes),CancellationToken.None);
this.response = ADUMessage.Deserialize(bytes.Take(result.Count).ToArray());
PrintBytes(bytes.Take(result.Count).ToArray(), "响应");
return response;
}
else
{
throw new Exception("没有传入连接");
}
}
private async Task SendNoResponse(ADUMessage request)
{
PrintBytes(ADUMessage.Serialze(request), "请求");
if (Client != null)
{
await Client.Client.SendAsync(new Memory(ADUMessage.Serialze(request)));
}
else if (WebSocket != null)
{
await WebSocket.SendAsync(new ArraySegment(ADUMessage.Serialze(request)), WebSocketMessageType.Binary, true, CancellationToken.None);
}
else
{
throw new Exception("没有传入连接");
}
}
public byte[] BoolToBytes(bool[] bools)
{
int byteCount = (bools.Length + 7) / 8; // 计算所需的字节数
byte[] bytes = new byte[byteCount];
for (int i = 0; i < bools.Length; i++)
{
int byteIndex = i / 8; // 计算当前布尔值应该存储在哪个字节中
int bitIndex = i % 8; // 计算当前布尔值应该存储在字节的哪个位上
if (bools[i])
{
// 设置对应位为 1
bytes[byteIndex] |= (byte)(1 << bitIndex);
}
else
{
// 对应位保持为 0,无需额外操作
}
}
return bytes;
}
///
/// 读 读写线圈
///
///
///
/// Request_01(ushort startIndex, ushort length)
{
var request = CreateMsg();
request.Length = 0x06;
request.FunctionCode= 0x01;
request.Data = new byte[4];
BinaryWriter writer = new BigEndianBinaryWriter(new MemoryStream(request.Data));
writer.Write(startIndex);
writer.Write(length);
var response = await SendWithResponse(request);
BinaryReader reader = new BinaryReader(new MemoryStream(response.Data));
byte byteLength=reader.ReadByte();
byte[] bytes = reader.ReadBytes(byteLength);
bool[] bools= BytesToBools(bytes,length);
return bools;
}
///
/// 读 只读线圈
///
///
///
/// Request_02(ushort startIndex, ushort length)
{
var request = CreateMsg();
request.Length = 0x06;
request.FunctionCode = 0x02;
request.Data = new byte[4];
BinaryWriter writer = new BigEndianBinaryWriter(new MemoryStream(request.Data));
writer.Write(startIndex);
writer.Write(length);
var response = await SendWithResponse(request);
BinaryReader reader = new BinaryReader(new MemoryStream(response.Data));
byte byteLength = reader.ReadByte();
byte[] bytes = reader.ReadBytes(byteLength);
bool[] bools = BytesToBools(bytes, length);
return bools;
}
///
/// 读 读写寄存器
///
///
///
/// Request_03(ushort startIndex, ushort length)
{
var request = CreateMsg();
request.Length = 0x06;
request.FunctionCode = 0x03;
request.Data = new byte[4];
BinaryWriter writer = new BigEndianBinaryWriter(new MemoryStream(request.Data));
writer.Write(startIndex);
writer.Write(length);
var response = await SendWithResponse(request);
BinaryReader reader = new BigEndianBinaryReader(new MemoryStream(response.Data));
byte byteLength = reader.ReadByte();
ushort[] registers = new ushort[length];
for (int i = 0; i < length; i++)
{
registers[i] = reader.ReadUInt16();
}
return registers;
}
///
/// 读 只读寄存器
///
///
///
/// Request_04(ushort startIndex, ushort length)
{
var request = CreateMsg();
request.Length = 0x06;
request.FunctionCode = 0x04;
request.Data = new byte[4];
BinaryWriter writer = new BigEndianBinaryWriter(new MemoryStream(request.Data));
writer.Write(startIndex);
writer.Write(length);
var response = await SendWithResponse(request);
BinaryReader reader = new BigEndianBinaryReader(new MemoryStream(response.Data));
byte byteLength = reader.ReadByte();
ushort[] registers = new ushort[length];
for (int i = 0; i < registers.Length; i++)
{
registers[i] = reader.ReadUInt16();
}
return registers;
}
///
/// 写 读写一个线圈
///
///
///
/// Request_05(ushort startIndex, bool coil)
{
var request = CreateMsg();
request.Length = 0x06;
request.FunctionCode = 0x05;
request.Data = new byte[4];
BinaryWriter writer = new BigEndianBinaryWriter(new MemoryStream(request.Data));
writer.Write(startIndex);
if (coil)
{
writer.Write((ushort)0xff00);
}
else
{
writer.Write((ushort)0x0000);
}
await SendNoResponse(request);
return request;
}
///
/// 写 读写一个寄存器
///
///
///
/// Request_06(ushort startIndex, ushort register)
{
var request = CreateMsg();
request.Length = 0x06;
request.FunctionCode = 0x06;
request.Data = new byte[4];
BinaryWriter writer = new BigEndianBinaryWriter(new MemoryStream(request.Data));
writer.Write(startIndex);
writer.Write(register);
await SendNoResponse(request);
return request;
}
///
/// 写 读写多个线圈
///
///
///
/// Request_0f(ushort startIndex, bool[] coils)
{
var request = CreateMsg();
request.FunctionCode = 0x0f;
request.Data = new byte[4+1+(coils.Length+7)/8];
BinaryWriter writer = new BigEndianBinaryWriter(new MemoryStream(request.Data));
writer.Write((ushort)startIndex);
var coilBytes = BoolToBytes(coils);
request.Length = (ushort)(7 + coilBytes.Length);
writer.Write((ushort)coils.Length);
writer.Write((byte)coilBytes.Length);
writer.Write(coilBytes);
await SendNoResponse(request);
return request;
}
///
/// 写 读写多个寄存器
///
///
///
/// Request_10(ushort startIndex, ushort[] registers)
{
var request = CreateMsg();
request.Length = (ushort)(7+ registers.Length * 2);
request.FunctionCode = 0x10;
request.Data = new byte[4+1+registers.Length*2];
BinaryWriter writer = new BigEndianBinaryWriter(new MemoryStream(request.Data));
writer.Write((ushort)startIndex);
writer.Write((ushort)registers.Length);
writer.Write((byte)(registers.Length * 2));
for (int i = 0; i < registers.Length; i++)
{
writer.Write(registers[i]);
}
await SendNoResponse(request);
return request;
}
}
internal class Program
{
static WebModbusServer webModbusServer;
static void Main(string[] args)
{
webModbusServer = new WebModbusServer();
//服务器
if (args.Length == 1)
{
//webModbusServer.store.WriteCoilDiscretes(0, new bool[] { true, true });
//webModbusServer.store.CoilInputs[0] = true;
//webModbusServer.store.CoilInputs[1] = true;
StartServer(args[0]);
}
//客户端
else
{
Task.Run(async () =>
{
await StartClient(args);
}).Wait();
}
}
private static void StartServer(string args)
{
int serverPort = Convert.ToInt32(args);
var server = new TcpListener(IPAddress.Parse("127.0.0.1"), serverPort);
Console.WriteLine($"TCP服务器 127.0.0.1:{serverPort}");
server.Start();
int cnt = 0;
Task.Run(async () =>
{
List clients = new List();
while (true)
{
TcpClient client = await server.AcceptTcpClientAsync();
clients.Add(client);
cnt++;
var ep = client.Client.RemoteEndPoint as IPEndPoint;
Console.WriteLine($"TCP客户端_{cnt} {ep.Address}:{ep.Port}");
//给这个客户端开一个聊天线程
//操作系统将会根据游客端口对应表将控制权交给对应游客线程
//StartChat(client);
StartModbus(client);
}
}).Wait();
}
private static async Task StartClient(string[] args)
{
int clientPort = Convert.ToInt32(args[0]);
int serverPort = Convert.ToInt32(args[1]);
var client = new TcpClient(new IPEndPoint(IPAddress.Parse("127.0.0.1"), clientPort));
Console.WriteLine($"TCP客户端 127.0.0.1:{clientPort}");
await client.ConnectAsync(new IPEndPoint(IPAddress.Parse("127.0.0.1"), serverPort));
Console.WriteLine($"连接到 127.0.0.1:{serverPort}");
WebModbusClient webModbusClient = new WebModbusClient(client);
Console.WriteLine("【功能码】 【地址】 【数量|数据】");
while (true)
{
Console.WriteLine("请输入指令");
string? msg = Console.ReadLine();
while (msg == null)
{
//功能码 数据
msg = Console.ReadLine();
}
try
{
string[] data = msg.Split(' ');
ushort funCode = ushort.Parse(data[0],NumberStyles.HexNumber);
ushort startIndex;
ushort length;
switch (funCode)
{
//读 读写线圈
case 0x01:
startIndex = ushort.Parse(data[1]);
length= ushort.Parse(data[2]);
var rs_01 = await webModbusClient.Request_01(startIndex, length);
PrintBools(rs_01);
break;
//读 只读线圈
case 0x02:
startIndex = ushort.Parse(data[1]);
length = ushort.Parse(data[2]);
var rs_02 = await webModbusClient.Request_02(startIndex, length);
PrintBools(rs_02);
break;
//读 读写寄存器
case 0x03:
startIndex = ushort.Parse(data[1]);
length = ushort.Parse(data[2]);
var rs_03 = await webModbusClient.Request_03(startIndex, length);
for (global::System.Int32 i = 0; i < length; i++)
{
Console.Write(rs_03[i]+" ");
}
Console.WriteLine();
break;
//读 只读寄存器
case 0x04:
startIndex = ushort.Parse(data[1]);
length = ushort.Parse(data[2]);
var rs_04 = await webModbusClient.Request_04(startIndex, length);
for (global::System.Int32 i = 0; i < length; i++)
{
Console.Write(rs_04[i] + " ");
}
Console.WriteLine();
break;
//写 读写一个线圈
case 0x05:
startIndex = ushort.Parse(data[1]);
var coil = bool.Parse(data[2]);
var rs_05 = await webModbusClient.Request_05(startIndex, coil);
break;
//写 读写一个寄存器
case 0x06:
startIndex = ushort.Parse(data[1]);
var register = ushort.Parse(data[2]);
var rs_06 = await webModbusClient.Request_06(startIndex, register);
break;
//写 读写多个线圈
case 0x0f:
startIndex = ushort.Parse(data[1]);
bool[] coils = new bool[data.Length - 2];
for (global::System.Int32 i = 2; i < data.Length; i++)
{
coils[i - 2] = bool.Parse(data[i]);
}
var rs_0f = await webModbusClient.Request_0f(startIndex, coils);
break;
//写 读写多个寄存器
case 0x10:
startIndex = ushort.Parse(data[1]);
ushort[] registers = new ushort[data.Length - 2];
for (global::System.Int32 i = 2; i < data.Length; i++)
{
registers[i - 2] = ushort.Parse(data[i]);
}
var rs_10 = await webModbusClient.Request_10(startIndex, registers);
break;
default:
//return Response_01(request);
break;
}
}
catch (Exception e)
{
}
}
}
public static async Task StartModbus(TcpClient client)
{
var buffer = new byte[1024 * 4];
while (client.Connected)
{
int msgLength = await client.Client.ReceiveAsync(new ArraySegment(buffer));
//关闭连接时会接收到一次空消息,不知道为什么
if (msgLength>0)
{
PrintBytes(buffer.Take(msgLength).ToArray(), "请求 ");
ADUMessage response = webModbusServer.HandleRequest(buffer.Take(msgLength).ToArray());
await client.Client.SendAsync(ADUMessage.Serialze(response));
PrintBytes(ADUMessage.Serialze(response), "响应 ");
}
}
}
public static void PrintBytes(byte[] bytes,string prefix="")
{
Console.Write(prefix);
for (int i = 0; i < bytes.Length; i++)
{
if (i < 2)
{
Console.ForegroundColor = ConsoleColor.Red;
}
else if(i<4)
{
Console.ForegroundColor = ConsoleColor.Green;
}
else if(i<6)
{
Console.ForegroundColor= ConsoleColor.Blue;
}
else if (i < 7)
{
Console.ForegroundColor = ConsoleColor.Yellow;
}
else if (i<8)
{
Console.ForegroundColor = ConsoleColor.DarkCyan;
}
else
{
Console.ForegroundColor = ConsoleColor.White;
}
Console.Write(bytes[i].ToString("X2") + " ");
}
Console.WriteLine();
}
public static void PrintBools(bool[] bools)
{
for (int i = 0; i < bools.Length; i++)
{
Console.Write(bools[i] + " ");
}
Console.WriteLine();
}
}
public class BigEndianBinaryReader : BinaryReader
{
public BigEndianBinaryReader(Stream input) : base(input)
{
}
public override short ReadInt16()
{
var data = base.ReadBytes(2);
Array.Reverse(data);
return BitConverter.ToInt16(data, 0);
}
public override ushort ReadUInt16()
{
var data = base.ReadBytes(2);
Array.Reverse(data);
return BitConverter.ToUInt16(data, 0);
}
public override int ReadInt32()
{
var data = base.ReadBytes(4);
Array.Reverse(data);
return BitConverter.ToInt32(data, 0);
}
public override uint ReadUInt32()
{
var data = base.ReadBytes(4);
Array.Reverse(data);
return BitConverter.ToUInt32(data, 0);
}
public override long ReadInt64()
{
var data = base.ReadBytes(8);
Array.Reverse(data);
return BitConverter.ToInt64(data, 0);
}
public override float ReadSingle()
{
var data = base.ReadBytes(4);
Array.Reverse(data);
return BitConverter.ToSingle(data, 0);
}
public override double ReadDouble()
{
var data = base.ReadBytes(8);
Array.Reverse(data);
return BitConverter.ToDouble(data, 0);
}
// 可以继续添加其他方法来支持更多数据类型的大端读取
}
public class BigEndianBinaryWriter : BinaryWriter
{
public BigEndianBinaryWriter(Stream input) : base(input)
{
}
public override void Write(ushort value)
{
var bytes = BitConverter.GetBytes(value);
Array.Reverse(bytes);
base.Write(bytes);
}
public override void Write(short value)
{
var bytes = BitConverter.GetBytes(value);
Array.Reverse(bytes);
base.Write(bytes);
}
public override void Write(uint value)
{
var bytes = BitConverter.GetBytes(value);
Array.Reverse(bytes);
base.Write(bytes);
}
public override void Write(int value)
{
var bytes = BitConverter.GetBytes(value);
Array.Reverse(bytes);
base.Write(bytes);
}
public override void Write(ulong value)
{
var bytes = BitConverter.GetBytes(value);
Array.Reverse(bytes);
base.Write(bytes);
}
public override void Write(long value)
{
var bytes = BitConverter.GetBytes(value);
Array.Reverse(bytes);
base.Write(bytes);
}
// 可以继续添加其他方法来支持更多数据类型的大端写入
}
程序所需命令行参数的一种方式是在项目文件种指定,这在调试时比较方便
5234
可以注意到
ModbusTcp消息
的解析和Tcp没有什么关系。因此,验证了服务器和客户端的正确性之后,就可以把Tcp连接改为
WebSocket
连接了。
热门资讯