我们提供安全,免费的手游软件下载!
 米仓漫画 免费版
米仓漫画 免费版  枫牙漫画
枫牙漫画  漫天玉漫画 官网版下载正版
漫天玉漫画 官网版下载正版  漫天玉漫画 app2025官方版
漫天玉漫画 app2025官方版  特盐阅读 免费阅读
特盐阅读 免费阅读  游咔 app官方版下载
游咔 app官方版下载  亿雪影院 新版
亿雪影院 新版  SlookTV 官网版
SlookTV 官网版  clicli动漫 正版无广告
clicli动漫 正版无广告  飞沙电视 tv版安装
飞沙电视 tv版安装
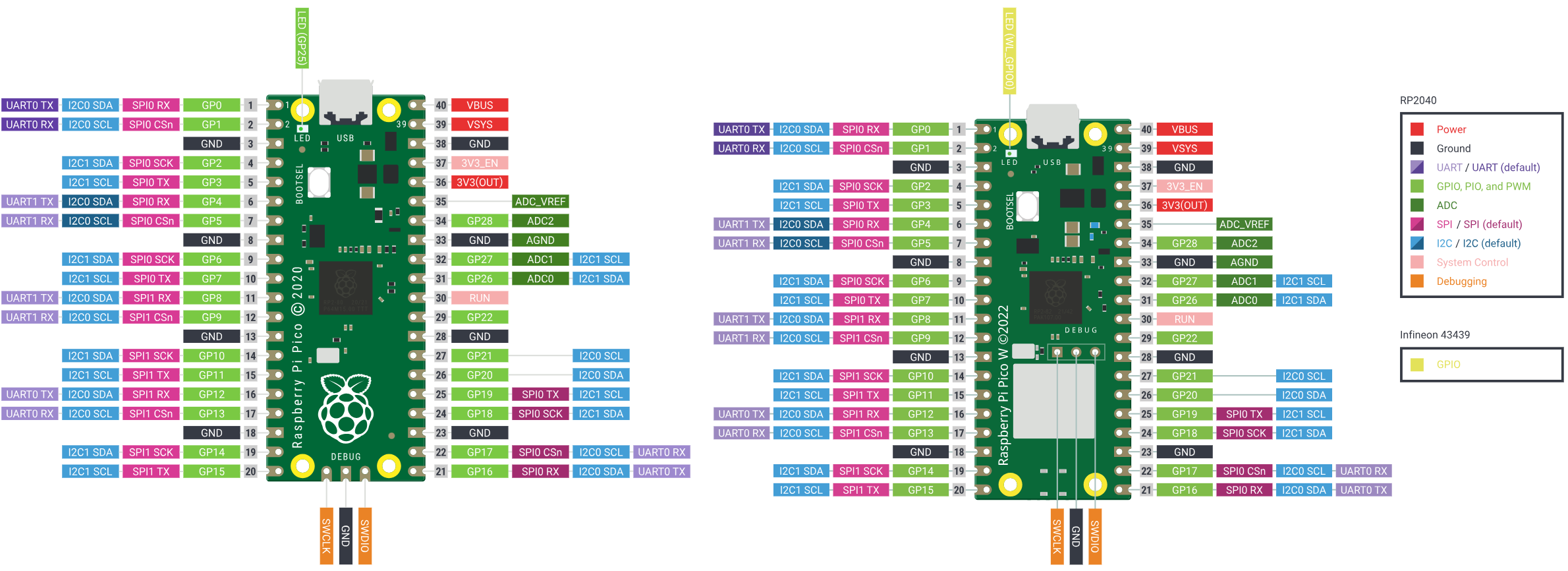
GPIO 是 General Purpose Input Output 的缩写,即“通用输入输出”。 Raspberry Pi Pico 左右两侧各有一列 GPIO 引脚, Pico 通过这两列引脚进行一些硬件上的扩展,与传感器进行交互等等。
简单的讲,每一个 GPIO 引脚都有两种模式: 输出模式 (OUTPUT)和 输入模式 (INPUT)。输出模式类似于一个电源,Pico 可以控制这个电源是否向外供电,比如打开外部的 LED 小灯,当然最有用的还是向外部设备发送信号。和输出模式相反,输入模式是接收外部设备发来的信号。GPIO 通常采用标准逻辑电平,即高电平和低电平,用二进制 0 和 1 表示。在这两个值中间还有阈值电平,即高电平和低电平之间的界限。Arduino 会将 -0.5 ~ 1.5 V 读取为低电平,3 ~ 5.5 V 读取为高电平, Pico 未查到相关资料。GPIO 还可用于中断请求,即设置 GPIO 为输入模式,值达到相应的要求时进行中断。
输入模式还包含两种特殊的输入模式: 上拉输入 (INPUT_PULLUP)和 下拉输入 (INPUT_PULLDOWN)。上拉输入就是芯片内部的电阻连接 VCC ,将该引脚设置为高电平状态。在没有外部信号输入的情况下,上拉输入可以保持引脚处于高电平状态,从而避免了信号的不确定性。在上拉输入模式中,如果外部输入了低电平信号,由于电阻的存在,引脚会读取到低电平,但不会产生大电流。这样,单片机可以轻易稳定地读取低电平信号。上拉输入的优势在于它可以提供稳定的高电平状态,直到检测到明确的低电平输入。下拉输入则相反,是将芯片内部的电阻连接 GND,将引脚设置为低电平状态,也是为了避免了信号的不确定性。上拉、下拉输入模式适用于一些特定场合,例如需要检测按钮按压(通常连接到低电平)或其他二进制开关状态。
使用 MicroPython 控制 GPIO 要使用
machine
包中的
Pin
类。
from machine import Pin
要获取引脚对象,我们先来看一看构造函数有哪些参数。
Pin(id: Any, mode: int = -1, pull: int = -1, *, value: Optional[int] = None, drive: Optional[int] = None, alt: Optional[int] = None)
id
是指引脚的编号。对于 Pico 而言就是引脚图中
GPxx
中的数字编号,这个参数是必填的。
mode
是指引脚的模式。常用的有
Pin.IN
输入模式,
Pin.OUT
输出模式。
pull
用来设置引脚输入的模式。
Pin.PULL_UP
上拉输入,
Pin.PULL_DOWN
下拉输入,
None
不设置。
value
设置输出引脚的默认状态。参数可以是任何转换为布尔值的变量,
1
默认输出高电平,
0
默认输出低电平。
drive
指定引脚的输出功率。参数可以是
Pin.LOW_POWER
、
Pin.MED_POWER
、
Pin.HIGH_POWER
,实际的输出功率还是取决于具体的引脚。
常见的用法参考下面的例子:
pin0 = Pin(0, mode=Pin.IN) # 设置 0 号引脚为输入模式
pin1 = Pin(1, mode=Pin.IN, pull=Pin.PULL_UP) # 设置 1 号引脚为上拉输入模式
pin2 = Pin(2, mode=Pin.OUT, value=0) # 设置 2 号引脚为输出模式,默认输出低电平
在获取到引脚对象后,可以使用
Pin.value(x: Optional[int] = None)
方法设置或读取引脚的值。参数
x
可以是任何转换为布尔值的变量,
1
输出高电平,
0
输出低电平。当不传递参数
x
时,方法为读取引脚的值。
pin2.value(1) # 设置 2 号引脚输出高电平
print(pin1.value()) # 读取 1 号引脚的输入值
当想要重新改变引脚的设置时,除了重新实例化对象之外,还可以使用
Pin.init(value: int, drive: int, alt: int, mode: int = -1, pull: int = -1)
、
Pin.mode(mode: Optional[int])
、
Pin.pull(pull: Optional[int])
对引脚重新设置。
pin0.mode(Pin.OUT) # 设置 0 号引脚为输出模式
pin1.pull(Pin.PULL_DOWN) # 设置 1 号引脚为下拉输入模式
pin2.init(mode=Pin.IN, pull=Pin.PULL_UP) # 设置 2 号引脚为上拉输入模式
有些时候当外部输入信号发生改变时,单片机需要执行一些操作,比如按下开关时亮灯。这就需要用到
中断
,中断是来自设备的一个信号,通知处理器暂停当前正在执行的任务,以优先处理该信号代表的工作,在处理完中断请求后,处理器才会恢复之前的任务。要设置引脚的中断,可以使用
Pin.irq(handler: Callable[[Pin], Any] = None, trigger: int = (IRQ_FALLING | IRQ_RISING), priority: int = 1, wake: int = None)
方法。
handler
是中断触发时要调用的方法。
trigger
用来设置触发中断的条件。
Pin.IRQ_FALLING
下降沿(高电平变低电平)触发,
Pin.IRQ_RISING
上升沿(低电平变高电平)触发,
Pin.IRQ_LOW_LEVEL
低电平触发,
Pin.IRQ_HIGH_LEVEL
高电平触发。这些值可以一起进行或运算,从而设置多条件触发。
priority
中断的优先级,值越大优先级越高。
wake
设置中断唤醒系统的电源模式。
machine.IDLE
空闲状态,可以快速恢复设备的运行,
machine.SLEEP
浅睡眠状态,唤醒后从请求睡眠的点恢复执行,
machine.DEEPSLEEP
深睡眠状态,唤醒后类似硬重置,程序从头执行。
# 设置 0 号引脚为上拉输入模式
pin = Pin(0, machine.Pin.IN, machine.Pin.PULL_UP)
# 定义一个中断处理函数
def irq_handler(pin, event):
print(pin, event)
# 设置引脚的中断,触发条件为下降沿
pin.irq(handler=irq_handler, trigger=machine.Pin.IRQ_FALLING)
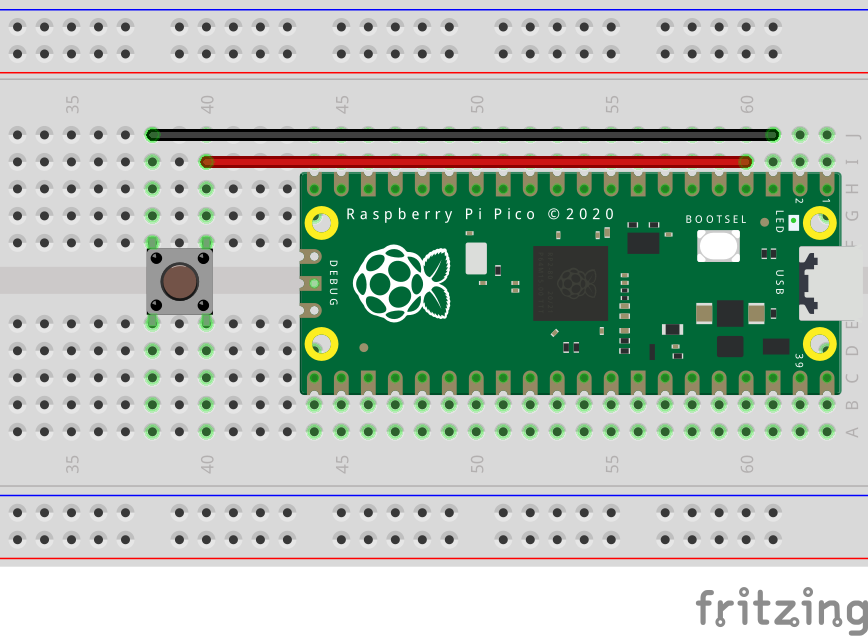
给 Pico 接入一个外部开关,当按下开关时,板载的 LED 小灯点亮。
| 名称 | 数量 |
|---|---|
| 微动开关 | x1 |
| 杜邦线 | 若干 |
微动开关
将 Pico 的
GP2
引脚配置成上拉输入模模式,将开关的一端与
GP2
连接。由于上拉输入在没有外部输入时读取始终为高电平信号,因此开关的另一段需要连接
GND
。当按下开关时
GP2
引脚会检测到低电平信号。那么怎样去不断检测开关是否被按下?最简单的一种方式,可以使用 while 循环,在循环体内不停读取
GP2
的值,从而判断开关的状态。具体的代码如下。
from machine import Pin
# 初始化引脚
button = Pin(2, mode=Pin.IN, pull=Pin.PULL_UP)
led = Pin('LED', mode=Pin.OUT)
# 在循环体内不停读取,当检测到低电平信号时,表明开关被按下
while True:
if not button.value():
led.value(1)
else:
led.value(0)
这个程序虽然能够实现效果,但也有一个致命问题:不断的循环使得程序只能检测开关是否被按下,而做不了任何其他事情。使用中断可以将检测与 CPU 处理完全分离,无需不断扫描引脚的值。当硬件检测到信号更改时,中断都会在信号变化后触发功能执行。具体的代码如下。
from machine import Pin
# 初始化引脚
button = Pin(2, mode=Pin.IN, pull=Pin.PULL_UP)
led = Pin('LED', mode=Pin.OUT)
# 定义一个中断服务方法,当检测到低电平信号时,改变 LED 的状态
def button_isr(pin):
led.value(not led.value())
# 配置中断,下降沿触发
button.irq(trigger=Pin.IRQ_FALLING, handler=button_isr)
while True:
pass # 可以做一些其他事情
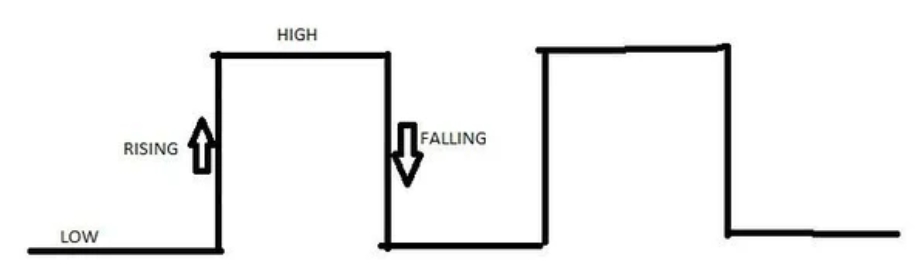
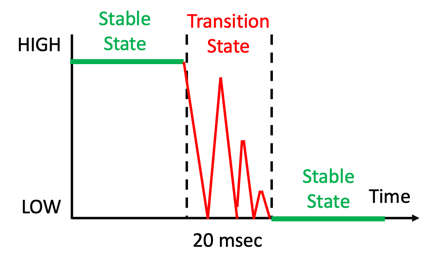
在运行上面的代码时,你可能已经注意到,按下按钮后 LED 存在闪烁的现象,这是为什么?是代码的错误吗?这是因为按钮并不是一个完美的开关,由于机械触点的弹性作用,一个按键开关在闭合时不会马上稳定地接通,在断开时也不会一下子断开,因而在闭合及断开的瞬间均伴随有一连串的“抖动”。信号从稳定状态移动,经过不稳定的过渡状态,最终到达新的稳定状态,如下图所示。
针对这种抖动现象,可以通过硬件进行去除,比如利用电容的充放电平滑的补偿信号的抖动。也可以利用软件进行去抖,信号抖动的状态有时间限制,添加一个短暂的延时再去检测电平信号。
from machine import Pin
import utime
last_time = 0 # 记录按下的时间
# 初始化引脚
button = Pin(2, mode=Pin.IN, pull=Pin.PULL_UP)
led = Pin('LED', mode=Pin.OUT)
# 定义一个中断服务方法,当检测到低电平信号时,改变 LED 的状态
def button_isr(pin):
global last_time
new_time = utime.ticks_ms()
# 延时
if (new_time - last_time) > 50:
led.value(not led.value())
last_time = new_time
# 配置中断,下降沿触发
button.irq(trigger=Pin.IRQ_FALLING, handler=button_isr)
while True:
pass # 可以做一些其他事情
相关资讯
热门资讯